

SCARA 로봇은 벨트 속도에 동기화되어 움직여야 작업물을 벨트에서 집을 수 있습니다. 리니어 엔코더 TTK70이 SCARA 로봇의 절대 위치를 정합니다. 이 엔코더는 콤팩트한 읽기 헤드와 기준 스케일 역할을 하는 자기 테이프로 구성되어 있습니다. 비접촉식 작동 원리로 인해 마모 없이 위치를 확인할 수 있습니다. 이 엔코더는 기준 스케일을 따라가면서 명료한 코드 패턴으로 절대 위치 정보를 파악하여 이를 평가 전자장치에 직업 전달합니다. 이 시스템은 설치 후 즉시 사용 가능하며, 정비가 전혀 필요 없어 시간과 비용을 절약할 수 있습니다.
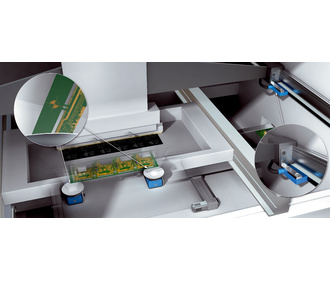
스크린 프린터는 다양한 사이즈의 인쇄회로기판을 처리하는데, 이를 위해서는 정밀 위치 데이터(± 10μm)가 필요합니다. 선형 앱솔루트 엔코더 TTK70은 이 데이터를 공급하며, 인쇄회로기판 사이즈가 바뀌어도 공정을 새로 초기화할 필요가 없습니다. 돔램프 장착 2D 비전 InspectorP63x 두 개가 인쇄회로기판 위 정렬 마크를 식별하여 기판이 스텐실에 맞게 정렬됐는지 점검합니다. 그럼으로써 유연하고 성능이 뛰어난 인쇄회로기판 SMD 실장이 가능합니다.
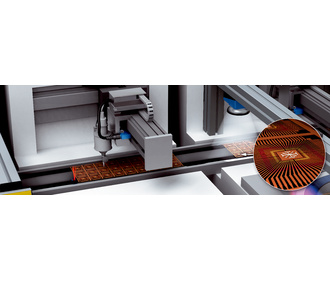
칩접착기에서는 정해진 웨이퍼 칩이나 직각 조각판이 리드프레임에 접착됩니다. 접착제가 정확하게 리드프레임에 위치하지 않으면 반도체칩은 쓸모없게 됩니다. 접착 지점이 잘못되었다면 칩을 제자리에 놓기 전에 이를 감지해야 합니다. 2D 비전 센서 Inspector를 사용하면 접착기의 가용성이 향상됩니다. 이 Inspector는 최대 16개 스위칭 출력부로 서로 다른 기준 이미지를 32개까지 지정할 수 있습니다. 칩 포지셔닝은 고속으로 진행되므로 최고의 정밀성이 요구됩니다. HIPERFACE® 인터페이스가 내장된 비접촉식 모터 피드백 시스템 TTK70은 큰 상대 운동까지도 작은 두 자릿수 µm 범위의 정확도로 보고합니다. 광센서 WT2S는 리드프레임이 사용되는 시작점을 정밀하게 감지하여 이를 이어지는 칩 접착에 활용합니다.
- 기술개요
-
- 어플리케이션
-
SCARA 로봇은 벨트 속도에 동기화되어 움직여야 작업물을 벨트에서 집을 수 있습니다. 리니어 엔코더 TTK70이 SCARA 로봇의 절대 위치를 정합니다. 이 엔코더는 콤팩트한 읽기 헤드와 기준 스케일 역할을 하는 자기 테이프로 구성되어 있습니다. 비접촉식 작동 원리로 인해 마모 없이 위치를 확인할 수 있습니다. 이 엔코더는 기준 스케일을 따라가면서 명료한 코드 패턴으로 절대 위치 정보를 파악하여 이를 평가 전자장치에 직업 전달합니다. 이 시스템은 설치 후 즉시 사용 가능하며, 정비가 전혀 필요 없어 시간과 비용을 절약할 수 있습니다.
스크린 프린터는 다양한 사이즈의 인쇄회로기판을 처리하는데, 이를 위해서는 정밀 위치 데이터(± 10μm)가 필요합니다. 선형 앱솔루트 엔코더 TTK70은 이 데이터를 공급하며, 인쇄회로기판 사이즈가 바뀌어도 공정을 새로 초기화할 필요가 없습니다. 돔램프 장착 2D 비전 InspectorP63x 두 개가 인쇄회로기판 위 정렬 마크를 식별하여 기판이 스텐실에 맞게 정렬됐는지 점검합니다. 그럼으로써 유연하고 성능이 뛰어난 인쇄회로기판 SMD 실장이 가능합니다.
칩접착기에서는 정해진 웨이퍼 칩이나 직각 조각판이 리드프레임에 접착됩니다. 접착제가 정확하게 리드프레임에 위치하지 않으면 반도체칩은 쓸모없게 됩니다. 접착 지점이 잘못되었다면 칩을 제자리에 놓기 전에 이를 감지해야 합니다. 2D 비전 센서 Inspector를 사용하면 접착기의 가용성이 향상됩니다. 이 Inspector는 최대 16개 스위칭 출력부로 서로 다른 기준 이미지를 32개까지 지정할 수 있습니다. 칩 포지셔닝은 고속으로 진행되므로 최고의 정밀성이 요구됩니다. HIPERFACE® 인터페이스가 내장된 비접촉식 모터 피드백 시스템 TTK70은 큰 상대 운동까지도 작은 두 자릿수 µm 범위의 정확도로 보고합니다. 광센서 WT2S는 리드프레임이 사용되는 시작점을 정밀하게 감지하여 이를 이어지는 칩 접착에 활용합니다.
- 다운로드
-
 TTK70 1.25 MB
TTK70 1.25 MB