

루프 컨트롤 시스템을 이용하면 보빈 교체 시 자재의 공급과 철거, 캘린더링 같은 공정을 분리할 수 있습니다. GL10, WL12, WL18 또는 WL27 같은 광전 역반사 센서가 루프 측정(꽉 차 있거나 빈 루프) 과제를 맡아 루프의 최소 및 최대 처짐을 감지합니다.
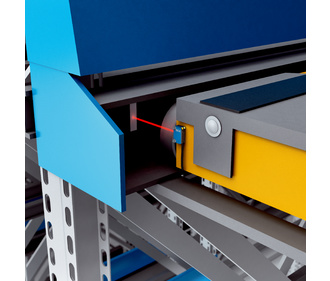
랙 통로 끝에 있는 시작/정지 위치에서 리플렉터에 맞춰 셔틀의 종료 위치를 초소형 광전 센서 GL6으로 검사해서 구동축에 있는 엔코더의 위치값과 비교하고, 필요시 수정합니다. 이렇게 기준을 잡으면 항상 높은 수준의 포지셔닝 정확도가 유지됩니다.

하중 운반 장치가 토트를 수용하기 전에 광전 역반사 센서 G6가 토트에 실제로 아무것도 없는지를 점검합니다. 토트 길이에 맞춰 여러 위치를 점검해야 합니다. 유도감응형 근접 센서 IQ08은 주행 방향에서 망원경 암의 포지셔닝을 제어합니다. 다양한 사이즈의 토트에 맞추기 위한 망원경 암의 측면 포지셔닝 과제는 아날로그 출력부가 있는 초음파 센서 UC4가 맡습니다. 이례적으로 안정적이고 수명이 긴 이 센서의 매우 콤팩트한 디자인은 공간 여유가 적은 경우에도 기계 설계 유연성을 최대한 보장합니다
- 기술개요
-
- 어플리케이션
-
루프 컨트롤 시스템을 이용하면 보빈 교체 시 자재의 공급과 철거, 캘린더링 같은 공정을 분리할 수 있습니다. GL10, WL12, WL18 또는 WL27 같은 광전 역반사 센서가 루프 측정(꽉 차 있거나 빈 루프) 과제를 맡아 루프의 최소 및 최대 처짐을 감지합니다.
랙 통로 끝에 있는 시작/정지 위치에서 리플렉터에 맞춰 셔틀의 종료 위치를 초소형 광전 센서 GL6으로 검사해서 구동축에 있는 엔코더의 위치값과 비교하고, 필요시 수정합니다. 이렇게 기준을 잡으면 항상 높은 수준의 포지셔닝 정확도가 유지됩니다.
하중 운반 장치가 토트를 수용하기 전에 광전 역반사 센서 G6가 토트에 실제로 아무것도 없는지를 점검합니다. 토트 길이에 맞춰 여러 위치를 점검해야 합니다. 유도감응형 근접 센서 IQ08은 주행 방향에서 망원경 암의 포지셔닝을 제어합니다. 다양한 사이즈의 토트에 맞추기 위한 망원경 암의 측면 포지셔닝 과제는 아날로그 출력부가 있는 초음파 센서 UC4가 맡습니다. 이례적으로 안정적이고 수명이 긴 이 센서의 매우 콤팩트한 디자인은 공간 여유가 적은 경우에도 기계 설계 유연성을 최대한 보장합니다
- 비디오
-
- 다운로드
-
 G10 시리즈 카타로그 4.90 MB
G10 시리즈 카타로그 4.90 MB