
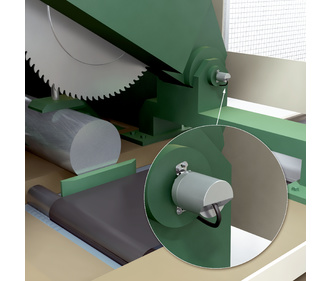
톱질 공정을 최적으로 제어하기 위해 톱날 높이를 자동 조정합니다. 인크리멘털 엔코더 DBS36은 이를 위해 정밀한 측정값을 제공합니다. 범용 케이블 접속구가 있어 페이스 마운트 플랜지나 중공축을 이용해 엔코더를 바로 간편하게 마운팅할 수 있습니다. 엔코더가 콤팩트해 공간을 많이 절약할 수 있습니다.

모듈식 이송 시스템을 조립 설비에 유연하게 맞추기 위해서 설비에 이른바 직각 이송기나 횡방향 이송 벨트 또는 셔틀 유닛이 투입됩니다. 이것으로 작업물 캐리어를 90도 또는 180도 회전할 수 있습니다. 작업물 캐리어의 위치 전환은 일반적으로 전동식 DC 모터와 스텝 모터 또는 공압식 승강 실린더로 이루어집니다. 인크리멘털 엔코더 DBS36 Core가 전기 축의 위치를 지정합니다. 이 엔코더는 블라인드 중공축 버전이나 중실축이 있는 페이스 마운트 플랜지 버전으로 제공됩니다. 이와 달리 공압식 승강 실린더에서 정밀한 위치 지정 과제는 자기감응형 원통형 센서 MZT8이 맡게 되어 있습니다.

롤 교체 시 잇따르는 롤 두 개의 필름 끝과 처음은 스플라이스 테이프로 연결됩니다. SICK의 색상 센서와 콘트라스트 센서, 발광 센서, 광택 센서가 이 테이프를 감지하여 필름을 셀로 가공하기 전에 이를 제거할 수 있도록 해줍니다. SICK 엔코더는 추가로 위치 측정의 정확도를 높여줍니다.
- 기술개요
-
- 어플리케이션
-
톱질 공정을 최적으로 제어하기 위해 톱날 높이를 자동 조정합니다. 인크리멘털 엔코더 DBS36은 이를 위해 정밀한 측정값을 제공합니다. 범용 케이블 접속구가 있어 페이스 마운트 플랜지나 중공축을 이용해 엔코더를 바로 간편하게 마운팅할 수 있습니다. 엔코더가 콤팩트해 공간을 많이 절약할 수 있습니다.
모듈식 이송 시스템을 조립 설비에 유연하게 맞추기 위해서 설비에 이른바 직각 이송기나 횡방향 이송 벨트 또는 셔틀 유닛이 투입됩니다. 이것으로 작업물 캐리어를 90도 또는 180도 회전할 수 있습니다. 작업물 캐리어의 위치 전환은 일반적으로 전동식 DC 모터와 스텝 모터 또는 공압식 승강 실린더로 이루어집니다. 인크리멘털 엔코더 DBS36 Core가 전기 축의 위치를 지정합니다. 이 엔코더는 블라인드 중공축 버전이나 중실축이 있는 페이스 마운트 플랜지 버전으로 제공됩니다. 이와 달리 공압식 승강 실린더에서 정밀한 위치 지정 과제는 자기감응형 원통형 센서 MZT8이 맡게 되어 있습니다.
롤 교체 시 잇따르는 롤 두 개의 필름 끝과 처음은 스플라이스 테이프로 연결됩니다. SICK의 색상 센서와 콘트라스트 센서, 발광 센서, 광택 센서가 이 테이프를 감지하여 필름을 셀로 가공하기 전에 이를 제거할 수 있도록 해줍니다. SICK 엔코더는 추가로 위치 측정의 정확도를 높여줍니다.
- 다운로드
-
 DBS36 CORE 2.43 MB
DBS36 CORE 2.43 MB