
혁신적이며 장애가 거의 없는 HIPERFACE- DSL® 프로토콜은 모터 케이블에 내장된 와이어 두 개만으로 통신을 실현합니다. 그래서 결국 로봇 제어용 구동장치마다 고도로 유연한 케이블을 단 한 개만 사용하게 되므로 비용 절감 효과가 큽니다. 또, 모터 피드백 시스템 EKS36은 추가로 사용 기간 히스토그램을 저장하므로 개별 구동장치에 대한 지속적인 애플리케이션 분석이 가능합니다.

사이드 로더는 포맷을 변환할 때 스토퍼를 정확하게 자동으로 변경할 수 있어야 새 제품을 정확하게 취급할 수 있습니다. 디지털 HIPERFACE-DSL® 인터페이스를 갖춘 모터 피드백 시스템 EKM36은 위치 실제값을 회전당 최대 20Bit까지 매우 정확하게 분해합니다. HIPERFACE DSL®로 케이블 비용이 50% 줄어듭니다.

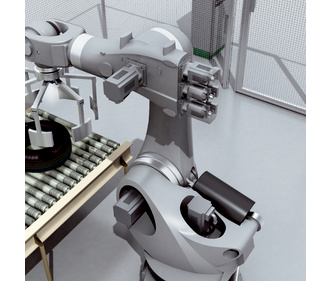
로봇 그리퍼는 반드시 정확히 움직여야 합니다. 이를 위해서는 기계적, 전자적 작동 양상을 최적화해야 합니다. 모터 피드백 시스템 HIPERFACE DSL®용 프로토콜을 이용하면 절반의 수 커넥터와 케이블 비용으로 보다 많은 양의 데이터와 감시 기능을 활용할 수 있습니다.
- 기술개요
-
- 어플리케이션
-
혁신적이며 장애가 거의 없는 HIPERFACE- DSL® 프로토콜은 모터 케이블에 내장된 와이어 두 개만으로 통신을 실현합니다. 그래서 결국 로봇 제어용 구동장치마다 고도로 유연한 케이블을 단 한 개만 사용하게 되므로 비용 절감 효과가 큽니다. 또, 모터 피드백 시스템 EKS36은 추가로 사용 기간 히스토그램을 저장하므로 개별 구동장치에 대한 지속적인 애플리케이션 분석이 가능합니다.
사이드 로더는 포맷을 변환할 때 스토퍼를 정확하게 자동으로 변경할 수 있어야 새 제품을 정확하게 취급할 수 있습니다. 디지털 HIPERFACE-DSL® 인터페이스를 갖춘 모터 피드백 시스템 EKM36은 위치 실제값을 회전당 최대 20Bit까지 매우 정확하게 분해합니다. HIPERFACE DSL®로 케이블 비용이 50% 줄어듭니다.
로봇 그리퍼는 반드시 정확히 움직여야 합니다. 이를 위해서는 기계적, 전자적 작동 양상을 최적화해야 합니다. 모터 피드백 시스템 HIPERFACE DSL®용 프로토콜을 이용하면 절반의 수 커넥터와 케이블 비용으로 보다 많은 양의 데이터와 감시 기능을 활용할 수 있습니다.
- 비디오
-
- 다운로드
-
 EKSEKM36 1.25 MB
EKSEKM36 1.25 MB